Intervehicle Communication
Published on Dec 06, 2015
Abstract
Intervehicle Communication (IVC) is attracting considerable attention from the research community and the automotive industry, where it is beneficial in providing intelligent transportation system (ITS) as well as drivers and passengers' assistant services. ITS that aim to streamline the operation of vehicles, manage vehicle traffic, assist drivers with safety and other information, along with provisioning of convenience applications for passengers such as automated toll collection systems, driver assist systems and other information provisioning systems.
In this context, Vehicular Ad hoc NETworks (VANETs) are emerging as a new class of wireless network, spontaneously formed between moving vehicles equipped with wireless interfaces that could have similar or different radio interface technologies, employing short-range to medium-range communication systems. A VANET is a form of mobile ad hoc network, providing communications among nearby vehicles and between vehicles and nearby fixed equipment on the roadside.
Vehicular networks are a novel class of wireless networks that have emerged thanks to advances in wireless technologies and the automotive industry. Vehicular networks are spontaneously formed between moving vehicles equipped with wireless interfaces that could be of homogeneous or heterogeneous technologies. These networks, also known as VANETs, are considered as one of the ad hoc network real-life application enabling communications among nearby vehicles as well as between vehicles and nearby ?xed equipment, usually described as roadside equipment.
Introduction of Intervehicle Communication
Vehicular network can be deployed by network operators and service providers or through integration between operators, providers, and a governmental authority. Recent advances in wireless technologies and the current and advancing trends in ad hoc network scenarios allow a number of deployment architectures for vehicular networks, in highway, rural, and city environments. Such architectures should allow communication among nearby vehicles and between vehicles and nearby ?xed roadside equipment.
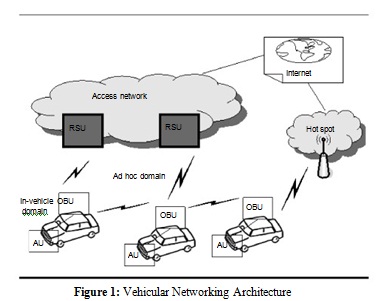
Figure 1 illustrates the reference architecture. This reference architecture is proposed within the C2C-CC, distinguishing it from 3 domains: in-vehicle, ad hoc and infrastructure domain[6]. The in-vehicle domain refers to a local network inside each vehicle logically composed of two types of units:
• an on-board unit (OBU) and
• one or more application unit(s) (AUs).
An OBU is a device in the vehicle having communication capabilities (wireless and/or wired), while an AU is a device executing a single or a set of applications while making use of the OBU's communication capabilities. Indeed, an AU can be an integrated part of a vehicle and be permanently connected to an OBU. It can also be a portable device such as a laptop or PDA that can dynamically attach to (and detach from) an OBU. The AU and OBU are usually connected with a wired connection, while wireless connection is also possible (using, e.g., Bluetooth, WUSB, or UWB). This distinction between AU and OBU is logical, and they can also reside in a single physical unit.
The ad hoc domain is a network composed of vehicles equipped with OBUs and road side units (RSUs) that are stationary along the road. OBUs of different vehicles form a mobile ad hoc network (MANET), where an OBU is equipped with communication devices, including at least a short-range wireless communication device dedicated for road safety.
OBUs and RSUs can be seen as nodes of an ad hoc network, respectively, mobile and static nodes. An RSU can be attached to an infrastructure network, which in turn can be connected to the Internet. RSUs can also communicate to each other directly or via multihop, and their primary role is the improvement of road safety, by executing special applications and by sending, receiving, or forwarding data in the ad hoc domain.
Two types of infrastructure domain access exist: RSU and hot spot. RSUs may allow OBUs to access the infrastructure, and consequently to be connected to the Internet. OBUs may also communicate with Internet via public, commercial, or private hot spots (Wi-Fi hot spots). In the absence of RSUs and hot spots, OBUs can utilize communication capabilities of cellular radio networks (GSM, GPRS, UMTS, WiMax, and 4G) if they are integrated in the OBU.
Active Road Safety Applications :
Active road safety applications are those that are primarily employed to decrease the probability of traffic accidents and the loss of life of the occupants of vehicles [7] . A signi?cant percentage of accidents that occur every year in all parts of the world are associated with intersection, head, rear-end and lateral vehicle collisions. Active road safety applications primarily provide information and assistance to drivers to avoid such collisions with other vehicles. This can be accomplished by sharing information between vehicles and road side units which is then used to predict collisions.
Such information can represent vehicle position, intersection position, speed and distance heading. Moreover, information exchange between the vehicles and the road side units is used to locate hazardous locations on roads, such as slippery sections or potholes. Some examples of active road safety applications are given below as
Intersection collision warning:
In this use case, the risk of lateral collisions for vehicles that are approaching road intersections is detected by vehicles or road side units. This information is signaled to the approaching vehicles in order to lessen the risk of lateral collisions.
Lane change assistance:
The risk of lateral collisions for vehicles that are accomplishing a lane change with blind spot for trucks is reduced.
Overtaking vehicle warning:
Aims to prevent collision between vehicles in an overtake situation, where one vehicle, say vehicle1 is willing to overtake a vehicle, say vehicle3, while another vehicle, say vehicle2 is already doing an overtaking maneuver on vehicle3. Collision between vehicle1 and vehicle2 is prevented when vehicle2 informs vehicle1 to stop its overtaking procedure.